Ads keep us online. Without them, we wouldn't exist. We don't have
paywalls or sell mods - we never will. But every month we have large bills
and running ads is our only way to cover them. Please consider unblocking us. Thank you from GameBanana
<3
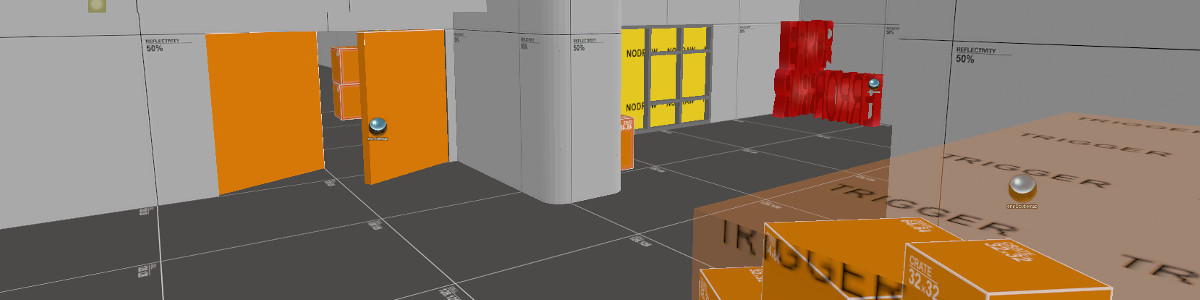
Creating Ragdoll Models
- A Tutorial for Source Engine.